Zašto je robotski bicikl najvažniji proboj u robotici ove godine
Predstavljamo revolucionarnog robota u obliku bicikla teškog oko 24 kilograma, koji je razvio institut pod vođstvom osnivača kompanije Boston Dynamics. Mašina koristi pokretni teret na mehaničkoj ruci kako bi generisala zamah za neverovatne akrobacije poput skokova preko visokih prepreka i salta unapred. Zahvaljujući veštačkoj inteligenciji i dubokom učenju, robot je samostalno savladao složene manevre bez prethodnog programiranja specifičnih pokreta. Uređaj dostiže brzinu od skoro 30 kilometara na čas i pokazuje izuzetnu stabilnost pri prizemljenju nakon leta kroz vazduh. Krajnji cilj istraživača je da osposobe ovog robota da autonomno prepoznaje okolinu i reaguje na prepreke brzinom ljudskih refleksa. Ova tehnologija postavlja nove standarde u svetu robotike jer kombinuje fizičku okretnost sa naprednim digitalnim simulacijama.
Ovo je prvi veliki potez Marka Rejberta (Marc Raibert) otkako se povukao sa mesta izvršnog direktora čuvene kompanije Boston Dynamics, i odmah je jasno da njegov novi Institut za robotiku i AI ne planira da prati utabane staze. Šta se zapravo dogodi kada jedan od najvećih vizionara današnjice odluči da redefiniše najosnovniji dizajn bicikla pomoću vrhunske veštačke inteligencije? Rezultat je mašina koja ne samo da briše granice između klasičnog inženjeringa i čiste akrobacije, već postavlja standarde za ono što nazivamo "ultra-mobilnošću".
1. Inovativni dizajn: Glava kao teg za balansiranje
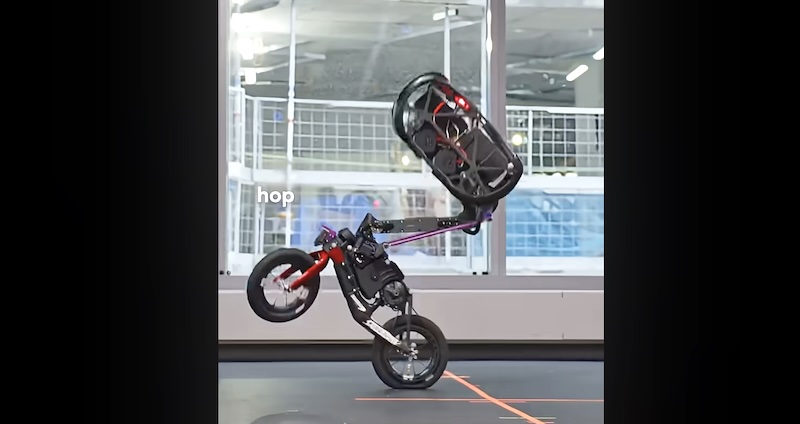
Fizička konstrukcija ovog robota teškog oko 24 kilograma (52 funte) predstavlja radikalan raskid sa tradicijom. Dok se većina robota oslanja na teške žiroskope ili unutrašnje točkove za održavanje ravnoteže, Rejbertov tim je upario lagani okvir bicikla sa teškom, pokretnom "glavom" koja je sa telom povezana preko robusne mehaničke ruke.
Ovaj pristup korišćenju "dinamičke mase" je daleko energetski efikasniji i bliži biologiji od tradicionalnih metoda stabilizacije. Umesto da se bori protiv gravitacije, robot je koristi kao alat:
"Bacanjem te mase unaokolo, on generiše zamah potreban za skokove, vožnju na zadnjem točku, pa čak i rotaciju u vazduhu."
Ovakva sposobnost da se masa koristi za generisanje zamaha omogućava robotu da izvodi dinamičke manevre koji bi bili nezamislivi za bilo koje vozilo slične veličine koje se oslanja isključivo na snagu motora u točkovima.
2. Revolucija u učenju: Od simulacije do stvarnosti bez podešavanja
Pravi tehnološki trijumf ovog projekta ne leži samo u hardveru, već u načinu na koji je robot "vaspitan". Tim je koristio metodu učenja potkrepljivanjem (Reinforcement Learning - RL), gde su sva kompleksna ponašanja prvo savladana unutar virtuelne simulacije.
Ono što ovaj razvoj čini revolucionarnim je takozvani "zero-tuning" transfer – sposobnost da se naučeni modeli prenesu direktno na fizički hardver bez ijednog sekunda dodatnog finog podešavanja u realnom svetu. U industriji gde su meseci pokušaja i grešaka na terenu norma, ovaj "Sveti gral" sim-to-real tranzicije predstavlja ogroman korak ka automatizovanom razvoju budućih generacija robota.
3. Emergentno ponašanje: Kada AI postane kreativan
Kao stručnjaka, najviše me fasciniraju detalji koji nisu bili deo originalnog koda – takozvana emergentna ponašanja. AI je samostalno otkrio strategije koje su efikasnije od onoga što bi ljudski programer predvideo.
Jedan od najupečatljivijih primera je manevar okretanja gde robot podiže prednji točak i rotira se (pivot) u mestu. Takođe, primetno je kako robot tokom salta unapred instinktivno "uvlači" svoju pokretnu masu (tucking) kako bi smanjio moment inercije i ubrzao rotaciju pre sletanja. Ovde na delu vidimo direktnu primenu zakona održanja momenta impulsa, koji je veštačka inteligencija "naučila" kroz milione iteracija u simulaciji, pronalazeći optimalan put kroz zakone fizike.
4. Prkošenje fizici: Specifikacije koje impresioniraju
Ovaj ultra-mobilni robot poseduje fizičke atribute koji bi postideli i profesionalne BMX vozače:
- Brzina: Dostiže impresivnih 18 milja na sat (oko 29 km/h).
- Neverovatan odraz: Sposoban je da preskoči prepreke više od 3 stope (skoro metar), što znači da preskače objekte koji su viši od njega samog.
- Akrobatska preciznost: Izvodi potpune salte unapred (front flips) uz savršeno "lepljenje" sletanja.
- Vertikalna agilnost: Lakoća kojom skače na platforme više od samog robota demonstrira izuzetan odnos snage i mase.
5. Budućnost: Videti svet ljudskim očima
Iako su ovi "cirkuski trikovi" impresivni, krajnji cilj Instituta je mnogo ambiciozniji: integracija vizuelne percepcije koja radi brzinom ljudskih refleksa. Tim trenutno radi na tome da robotu omogući da autonomno prepoznaje staze, ivičnjake i prepreke u realnom vremenu, navigirajući kroz njih brzinom čoveka.
Kada spojimo ovakvu akrobatsku agilnost sa vizuelnom inteligencijom, dobijamo mašinu koja može stići tamo gde nijedan točak do sada nije mogao. Postavlja se ključno pitanje: Da li smo kao društvo spremni da uskoro delimo gradske trotoare sa "akrobatskim kuririma" koji preskaču prepreke brzinom sprintera? Budućnost autonomije definitivno više nije vezana samo za asfaltirane puteve.
Komentari
Nema komentara. Šta vi mislite o ovome?