Kineski meki senzor omogućava robotskim rukama "ljudsku" spretnost i osećaj pokreta
Istraživači u Kini razvili su novi tip omni-direkcionog mekog senzora za savijanje koji humanoidnim robotima omogućava da prate položaj svojih prstiju sa neviđenom preciznošću. Ova tehnologija premošćuje jaz između grubog robotskog hvatanja i delikatne manipulacije predmetima.
🤖 Tehnologija iza "osećaja"
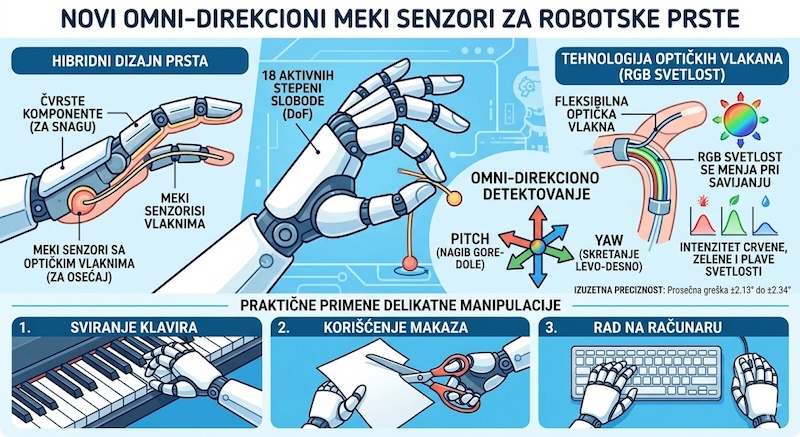
Za razliku od tradicionalnih senzora koji često mogu da detektuju pokret samo u jednom pravcu, ovaj novi sistem koristi fleksibilna optička vlakna i napredne algoritme kako bi robotu pružio pravu propriocepciju — sposobnost da u svakom trenutku zna tačan položaj svojih udova bez gledanja.
- Omni-direkciono detektovanje: Senzor prati i "pitch" (nagib gore-dole) i "yaw" (skretanje levo-desno) istovremeno.
- Optički princip: Tehnologija se oslanja na promenu intenziteta crvene, zelene i plave (RGB) svetlosti dok se senzori savijaju unutar prstiju.
- Hibridni dizajn: Ruka kombinuje čvrste komponente (za snagu) i meke senzore (za osećaj), što rezultira prirodnijim pokretima.
📊 Ključne karakteristike i performanse
Istraživanje je pokazalo da ovi senzori drastično smanjuju greške u merenju uglova, čineći ruku spremnom za najkompleksnije zadatke.
| Karakteristika | Detalji |
|---|---|
| Broj stepeni slobode | 18 aktivnih stepeni slobode (DoF) |
| Preciznost merenja | Prosečna greška od samo ±2.13° do ±2.34° |
| Sastav prstiju | 5 rigidno-fleksibilnih prstiju sa PMMA vlaknima |
| Primena | Hirurgija, protetika, precizna proizvodnja |
🎹 Šta robot sada može da radi?
Zahvaljujući ovom senzoru, robotska ruka više ne služi samo za "hvatanje i prenošenje". Testiranja su pokazala da ruka može uspešno da obavlja zadatke koji zahtevaju visoku koordinaciju:
- Sviranje klavira: Precizna kontrola pritiska i tajminga tastera.
- Korišćenje makaza: Koordinisano pomeranje više zglobova istovremeno.
- Rad na računaru: Upravljanje mišem i kucanje po tastaturi bez oštećenja opreme.
🌟 Zašto je ovo važno?
Ovaj napredak je ogroman korak ka robotima koji mogu bezbedno da rade rame uz rame sa ljudima ili da zamene ljudsku ruku u opasnim okruženjima gde je potrebna fina motorika. Umesto da se oslanjaju isključivo na kamere (vid), roboti sada počinju da se oslanjaju na unutrašnji osećaj za pokret, baš kao i mi.
Izvor: interestingengineering.com
Komentari
Nema komentara. Šta vi mislite o ovome?